

La Guía del Geek para la Experimentación con ML
Tabla de Enlaces
Abstracto y 1. Introducción
1.1 Explicación Post Hoc
1.2 El Problema de Desacuerdo
1.3 Fomentando el Consenso de Explicación
-
Trabajo Relacionado
-
Pear: Regularizador de Acuerdo de Explicador Post HOC
-
La Eficacia del Entrenamiento de Consenso
4.1 Métricas de Acuerdo
4.2 Mejorando las Métricas de Consenso
[4.3 ¿Consistencia a Qué Costo?]()
4.4 ¿Las Explicaciones Siguen Siendo Valiosas?
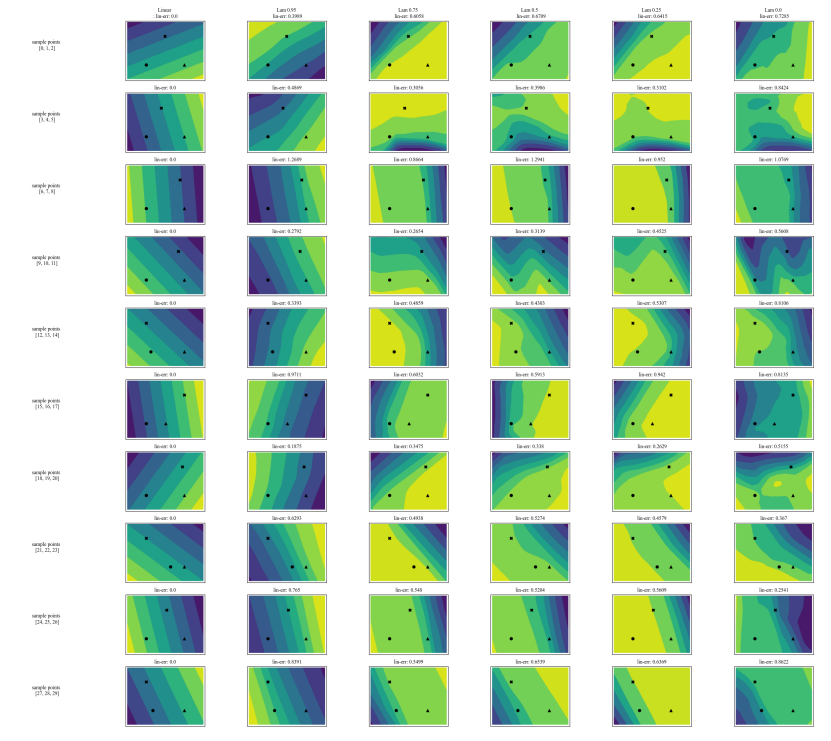
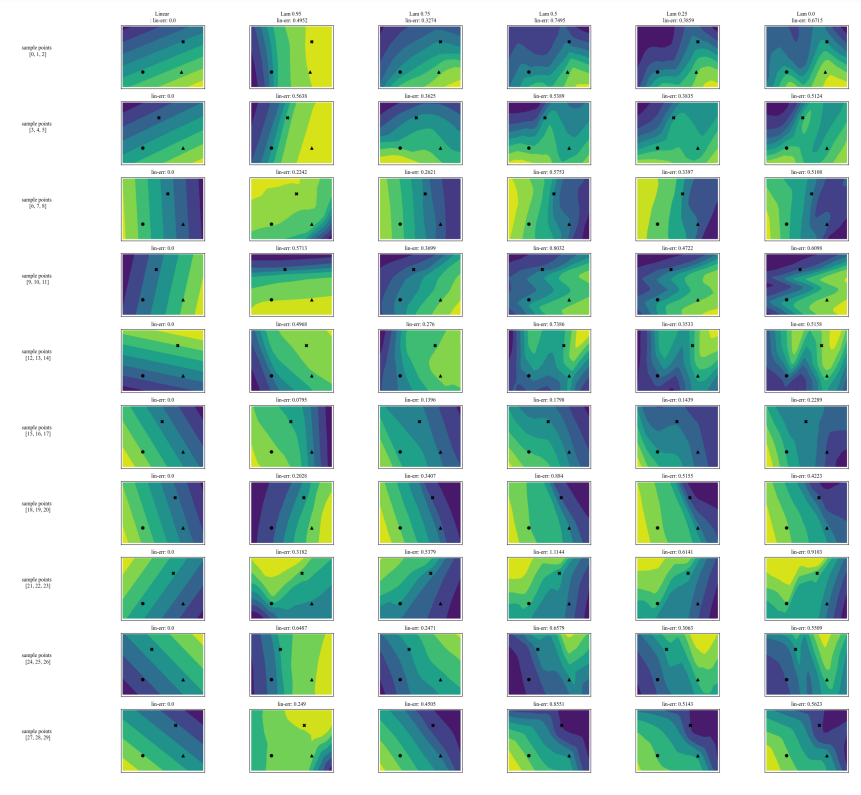
4.5 Consenso y Linealidad
4.6 Dos Términos de Pérdida
-
Discusión
5.1 Trabajo Futuro
5.2 Conclusión, Agradecimientos y Referencias
Apéndice
A APÉNDICE
A.1 Conjuntos de datos
En nuestros experimentos utilizamos conjuntos de datos tabulares originalmente de OpenML y compilados en un conjunto de conjuntos de datos de referencia del equipo Inria-Soda en HuggingFace [11]. Proporcionamos algunos detalles sobre cada conjunto de datos:
\ Bank Marketing Este es un conjunto de datos de clasificación binaria con seis características de entrada y está aproximadamente equilibrado en clases. Entrenamos con 7.933 muestras de entrenamiento y probamos con las 2.645 muestras restantes.
\ California Housing Este es un conjunto de datos de clasificación binaria con siete características de entrada y está aproximadamente equilibrado en clases. Entrenamos con 15.475 muestras de entrenamiento y probamos con las 5.159 muestras restantes.
\ Electricity Este es un conjunto de datos de clasificación binaria con siete características de entrada y está aproximadamente equilibrado en clases. Entrenamos con 28.855 muestras de entrenamiento y probamos con las 9.619 muestras restantes.
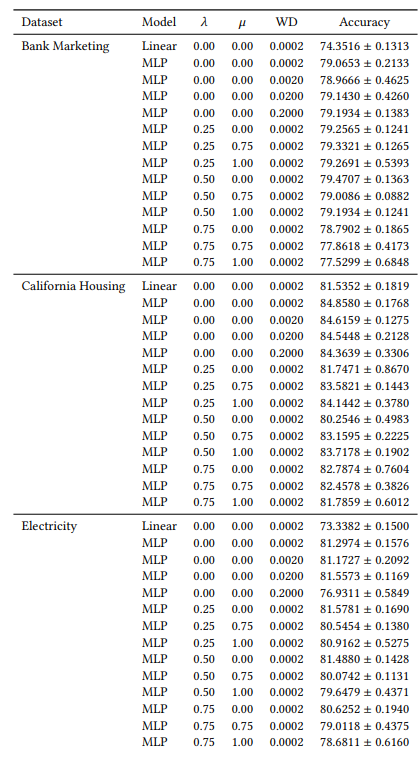
A.2 Hiperparámetros
Muchos de nuestros hiperparámetros son constantes en todos nuestros experimentos. Por ejemplo, todos los MLPs se entrenan con un tamaño de lote de 64 y una tasa de aprendizaje inicial de 0,0005. Además, todos los MLPs que estudiamos tienen 3 capas ocultas de 100 neuronas cada una. Siempre usamos el optimizador AdamW [19]. El número de épocas varía de un caso a otro. Para los tres conjuntos de datos, entrenamos durante 30 épocas cuando 𝜆 ∈ {0.0, 0.25} y 50 épocas en caso contrario. Al entrenar modelos lineales, usamos 10 épocas y una tasa de aprendizaje inicial de 0,1.
A.3 Métricas de Desacuerdo
Definimos cada una de las seis métricas de acuerdo utilizadas en nuestro trabajo aquí.
\ Las primeras cuatro métricas dependen de las características top-𝑘 más importantes en cada explicación. Sea 𝑡𝑜𝑝_𝑓 𝑒𝑎𝑡𝑢𝑟𝑒𝑠(𝐸, 𝑘) que representa las características top-𝑘 más importantes en una explicación 𝐸, sea 𝑟𝑎𝑛𝑘 (𝐸, 𝑠) el rango de importancia de la característica 𝑠 dentro de la explicación 𝐸, y sea 𝑠𝑖𝑔𝑛(𝐸, 𝑠) el signo (positivo, negativo o cero) de la puntuación de importancia de la característica 𝑠 en la explicación 𝐸.
\ 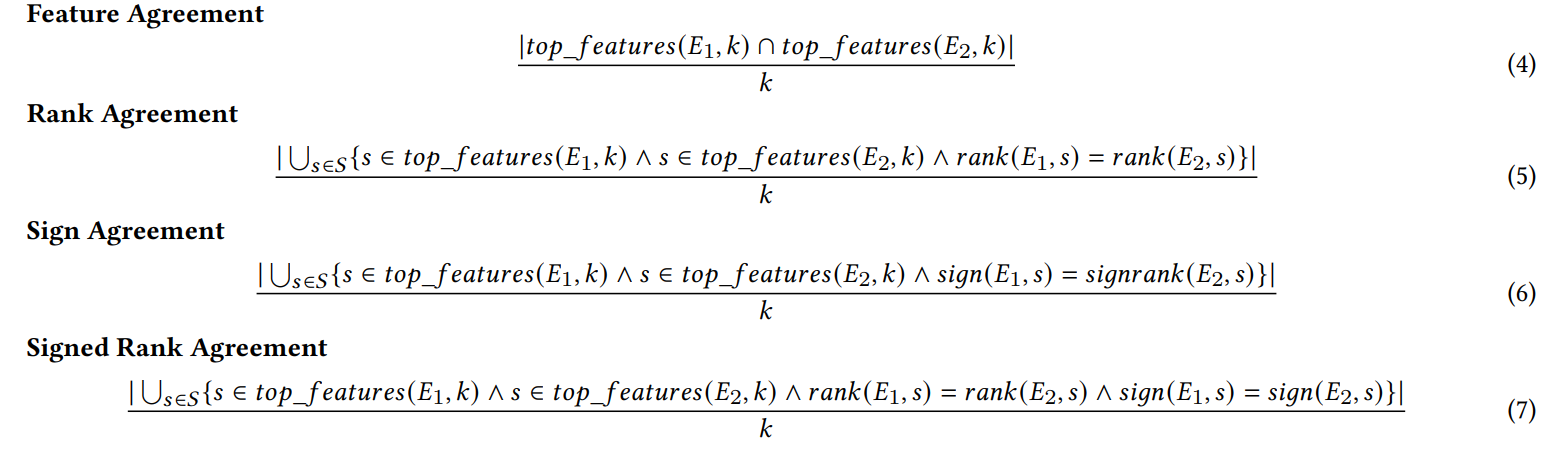
\ Las siguientes dos métricas de acuerdo dependen de todas las características dentro de cada explicación, no solo de las top-𝑘. Sea 𝑅 una función que calcula la clasificación de características dentro de una explicación por importancia.
\ 
\ (Nota: Krishna et al. [15] especifican en su artículo que 𝐹 debe ser un conjunto de características especificado por un usuario final, pero en nuestros experimentos usamos todas las características con esta métrica).
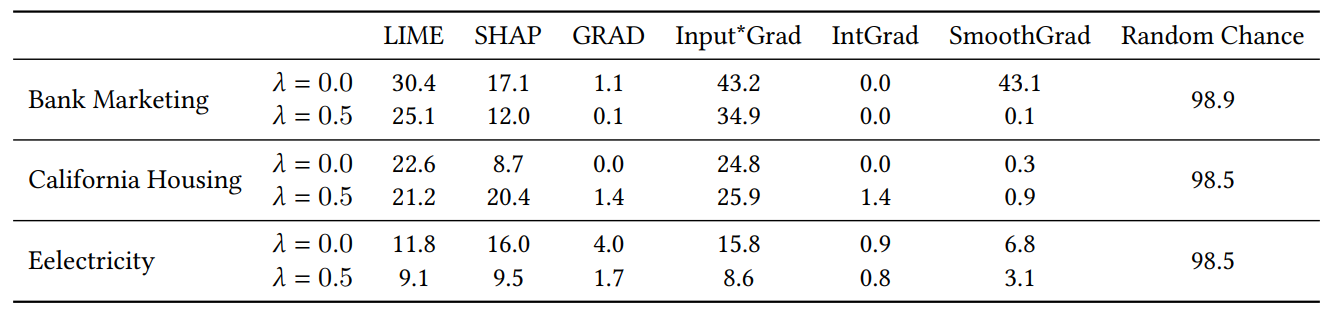
A.4 Resultados del Experimento con Características Basura
Cuando agregamos características aleatorias para el experimento en la Sección 4.4, duplicamos el número de características. Hacemos esto para comprobar si nuestra pérdida de consenso daña la calidad de la explicación al colocar características irrelevantes en el top-𝐾 con más frecuencia que los modelos entrenados naturalmente. En la Tabla 1, informamos el porcentaje de veces que cada explicador incluyó una de las características aleatorias en las 5 características más importantes. Observamos que en general, no vemos un aumento sistemático de estos porcentajes entre 𝜆 = 0.0 (un MLP de referencia sin nuestra pérdida de consenso) y 𝜆 = 0.5 (un MLP entrenado con nuestra pérdida de consenso)
\ 
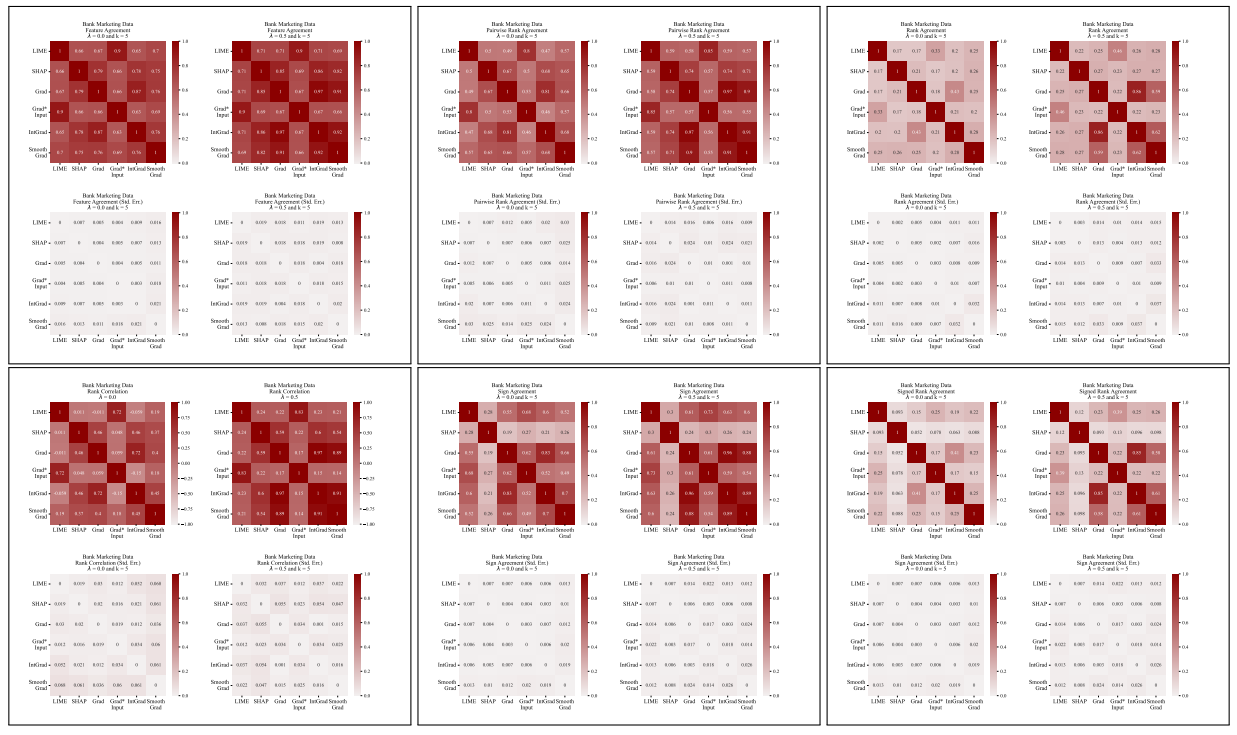
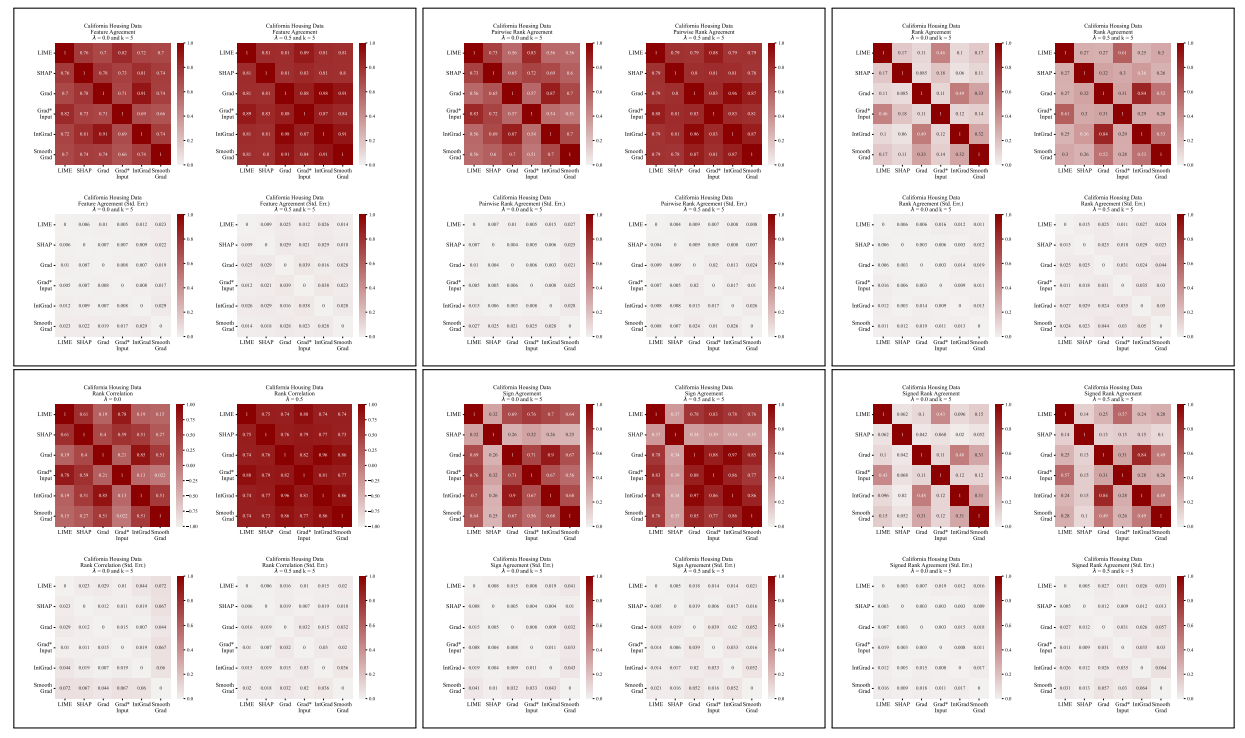
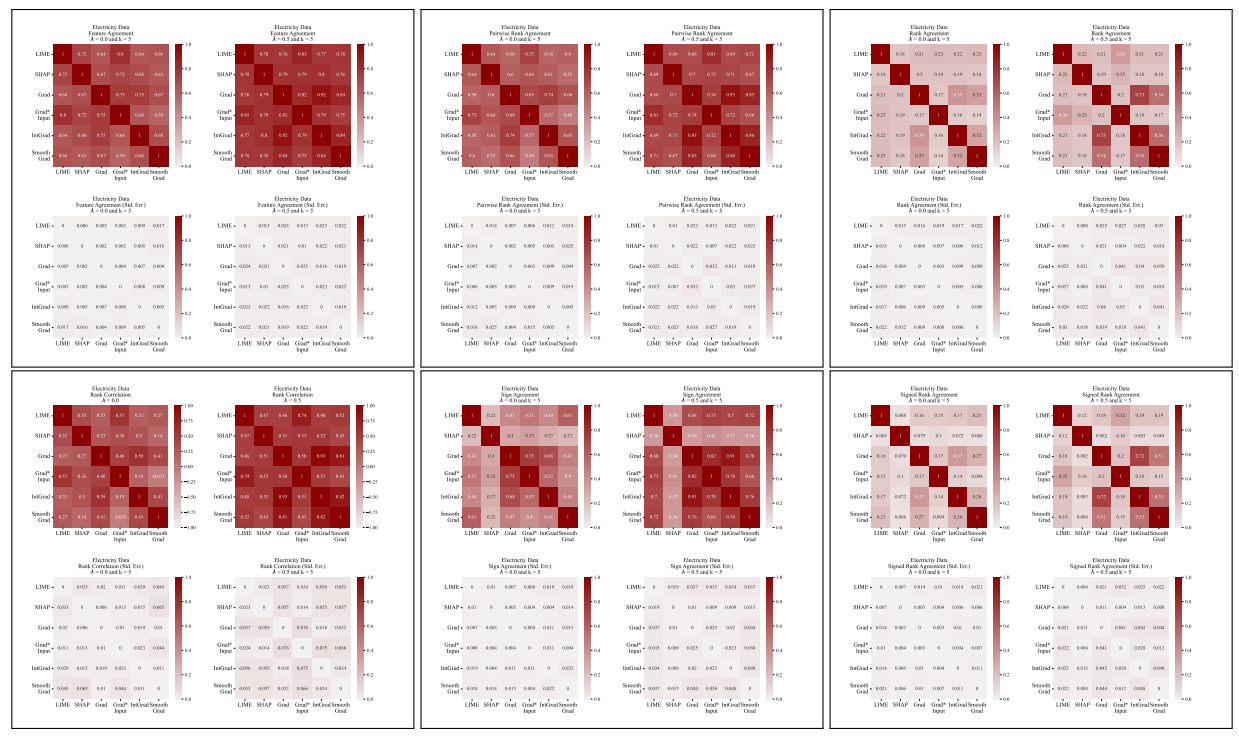
A.5 Más Matrices de Desacuerdo
\ 
\ 
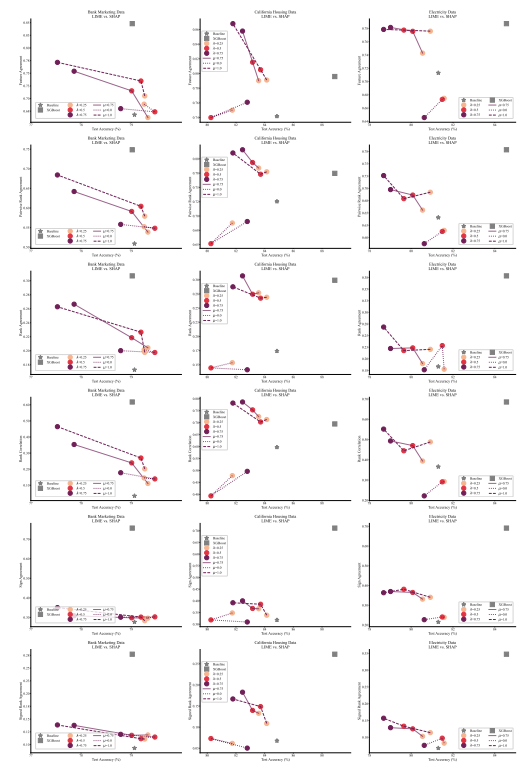
A.6 Resultados Extendidos
A.7 Gráficos Adicionales
\ 
\ 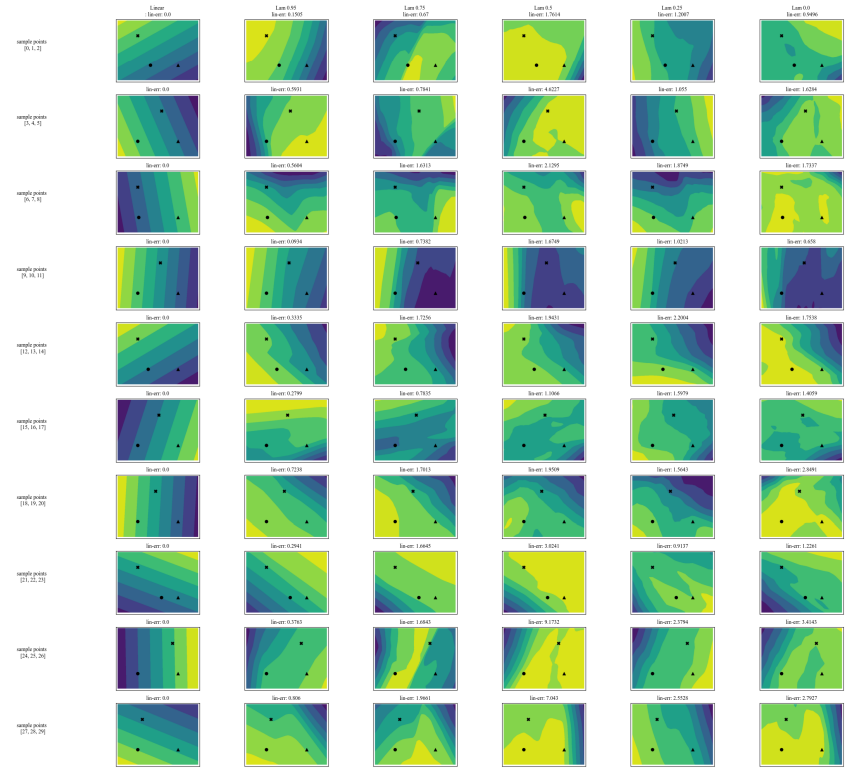
\ 
\
:::info Autores:
(1) Avi Schwarzschild, Universidad de Maryland, College Park, Maryland, EE.UU. y Trabajo completado mientras trabajaba en Arthur (avi1umd.edu);
(2) Max Cembalest, Arthur, Nueva York, Nueva York, EE.UU.;
(3) Karthik Rao, Arthur, Nueva York, Nueva York, EE.UU.;
(4) Keegan Hines, Arthur, Nueva York, Nueva York, EE.UU.;
(5) John Dickerson†, Arthur, Nueva York, Nueva York, EE.UU. (john@arthur.ai).
:::
:::info Este artículo está disponible en arxiv bajo la licencia CC BY 4.0 DEED.
:::
\
También te puede interesar

El desarrollador de Knots Luke Dashjr planea un Hard Fork para 'salvar Bitcoin'

Comunidad DeFi en alerta tras la sospecha de estafa de $3.6 millones de Hypervault
