

消融研究證實動態費率對 RECKONING 性能的必要性
連結表格
摘要和 1. 引言
-
背景
-
方法
-
實驗
4.1 多跳推理性能
4.2 帶干擾項的推理
4.3 對真實世界知識的泛化
4.4 運行時間分析
4.5 記憶知識
-
相關工作
-
結論、致謝和參考文獻
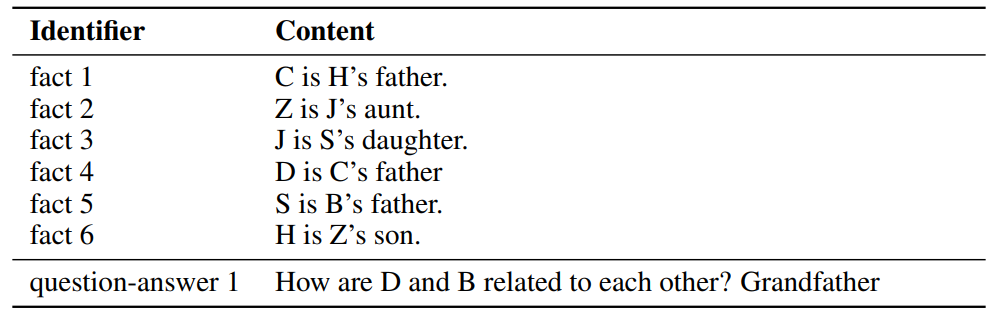
\ A. 數據集
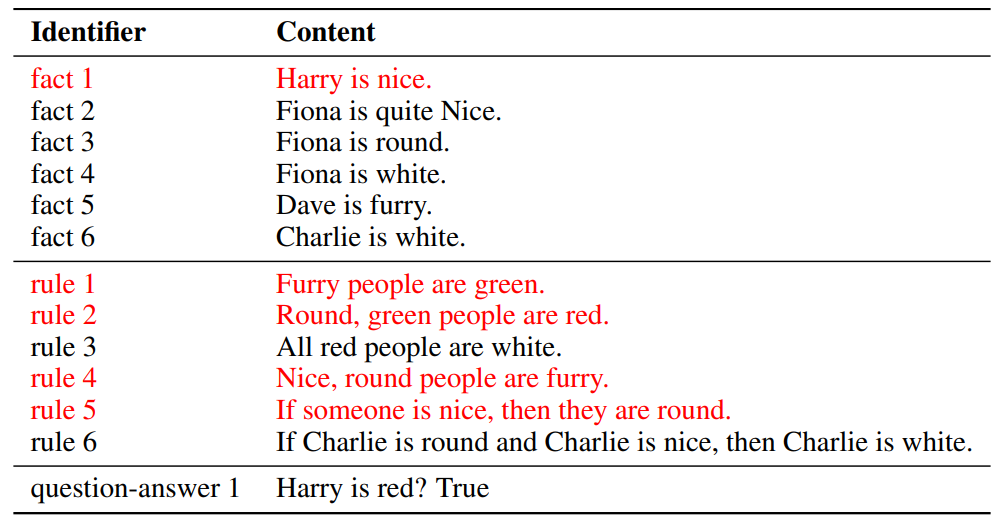
B. 帶干擾項的上下文推理
C. 實現細節
D. 自適應學習率
E. 大型語言模型實驗
D 自適應學習率
先前的研究 [3, 4] 表明,在步驟和參數之間共享的固定學習率無法提高系統的泛化性能。相反,[3] 建議為
\ 
\ 
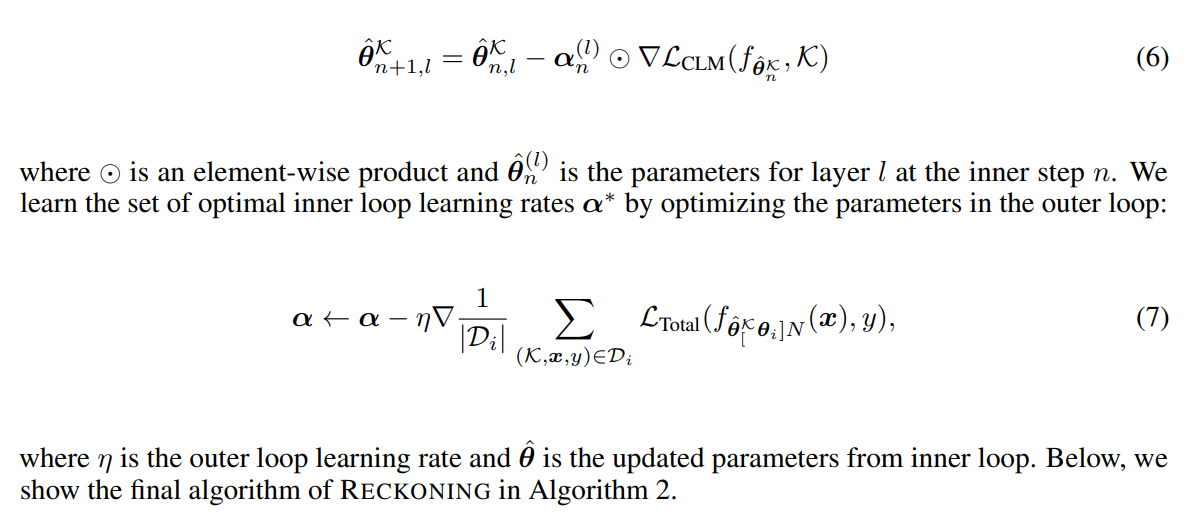
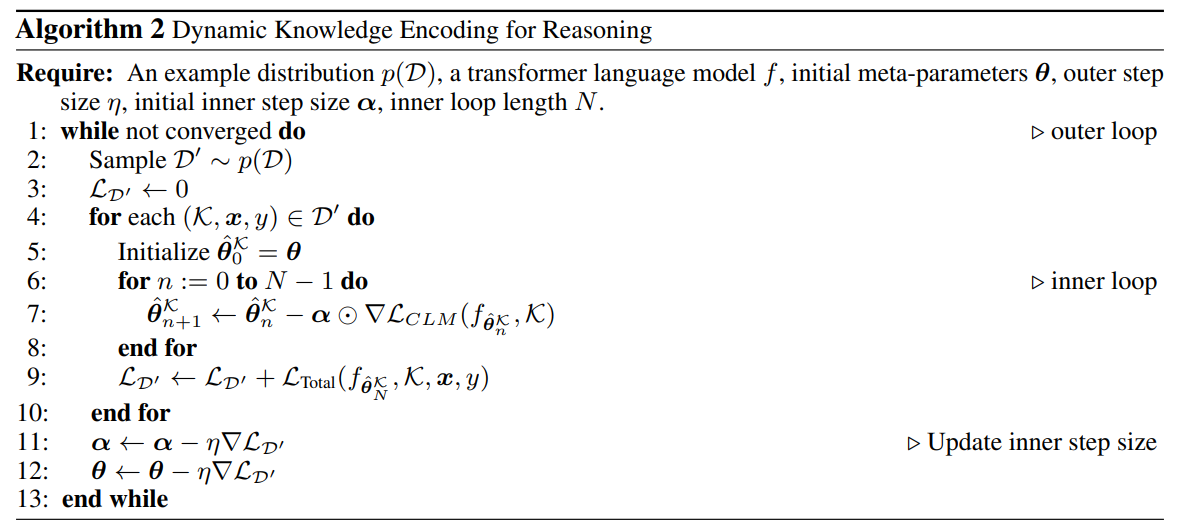
\ 每個網絡層和內循環中的每個適應步驟學習一個學習率。層參數可以學習在每個步驟動態調整學習率。為了在內循環中自適應地控制學習率 α,我們將 α 定義為一組可調整變量:α = {α0, α1, …αL},其中 L 是層數,對於每個 l = 0, …, L,αl 是一個具有 N 個元素的向量,給定預定義的內循環步驟數 N。內循環更新方程則變為
\ 
\ 
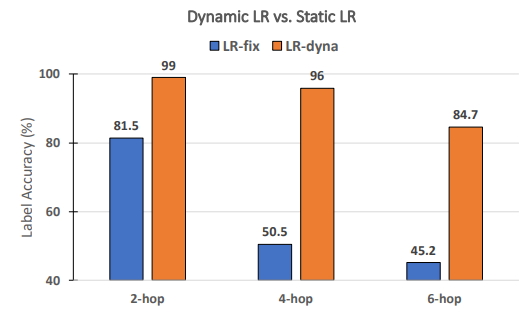
\ 動態學習率對 RECKONING 的性能是否必要? 遵循元學習的先前工作 [3, 4],我們為 RECKONING 動態學習一組每步每層的學習率。在這項消融研究中,我們分析內循環的動態學習率是否能有效提高外循環推理性能。同樣,我們固定其他實驗設置並將內循環步驟數設為 4。如圖 8 所示,當使用靜態學習率(即所有層和內循環步驟共享一個恆定學習率)時,性能大幅下降(平均下降了 34.2%)。對於需要更多推理跳躍的問題,性能下降更為顯著(4 跳下降了 45.5%,6 跳下降了 39.5%),這證明了在我們框架的內循環中使用動態學習率的重要性。
\ 
\
:::info 作者:
(1) Zeming Chen, EPFL (zeming.chen@epfl.ch);
(2) Gail Weiss, EPFL (antoine.bosselut@epfl.ch);
(3) Eric Mitchell, Stanford University (eric.mitchell@cs.stanford.edu)';
(4) Asli Celikyilmaz, Meta AI Research (aslic@meta.com);
(5) Antoine Bosselut, EPFL (antoine.bosselut@epfl.ch).
:::
:::info 本論文可在 Arxiv 上獲取,遵循 CC BY 4.0 DEED 許可證。
:::
\
您可能也會喜歡

Solana Company (HSDT) 股票:隨著 SOL 持有量增加到 230 萬,收益表現達 7%

美聯儲主席暗示 12 月降息並非板上釘釘,Bitcoin 滑落至 $110,000
